Ivan’s Apps is a personal development project where I create fun, thoughtful apps in my free time.
I focus on relaxed, engaging experiences that people can enjoy at their own pace.
Below is my first released app, with more projects planned for the future.
Idle Planecraft
Automate production and battle opponents in this relaxed aviation idle game.

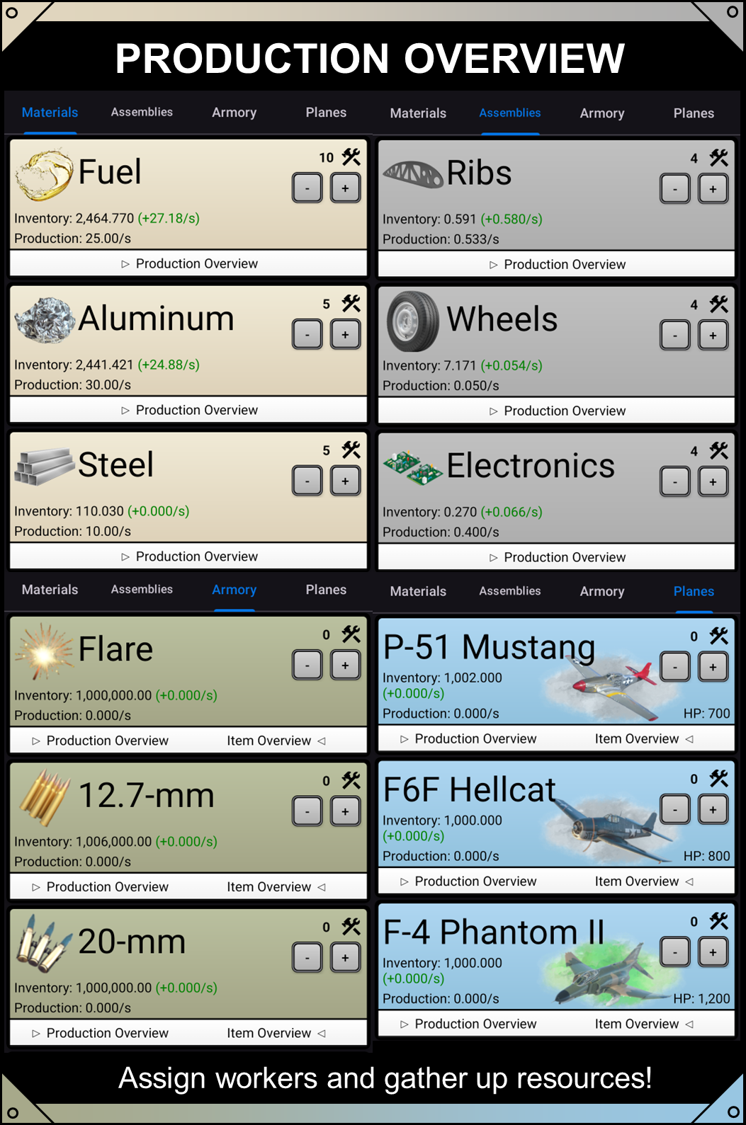
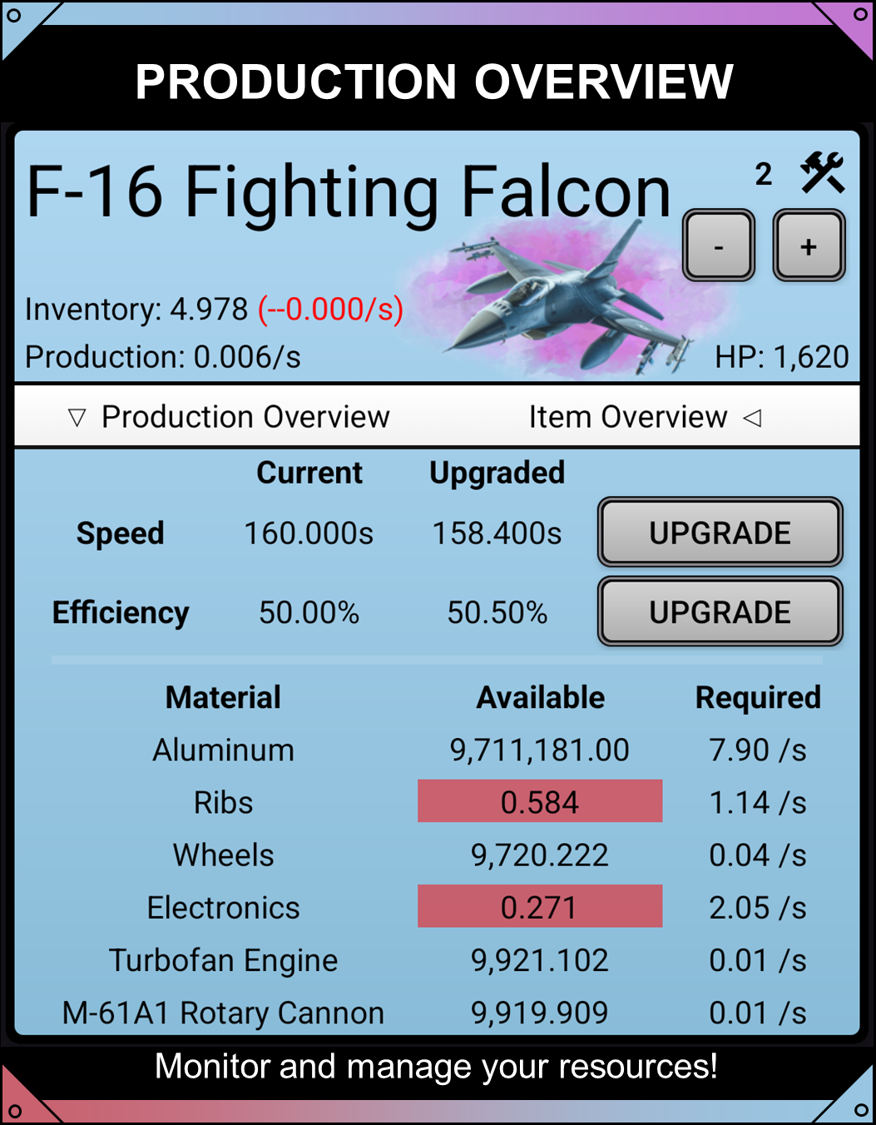
Idle Planecraft is an aviation-themed idle game where you automate the gathering of resources, automate the building of assemblies, armaments, and aircraft, and deploy them into battle all at your own pace.
Recruit workers, automate production, and watch your resources grow even while you’re away.
✈️ Key Features
- Recruit workers and automate production
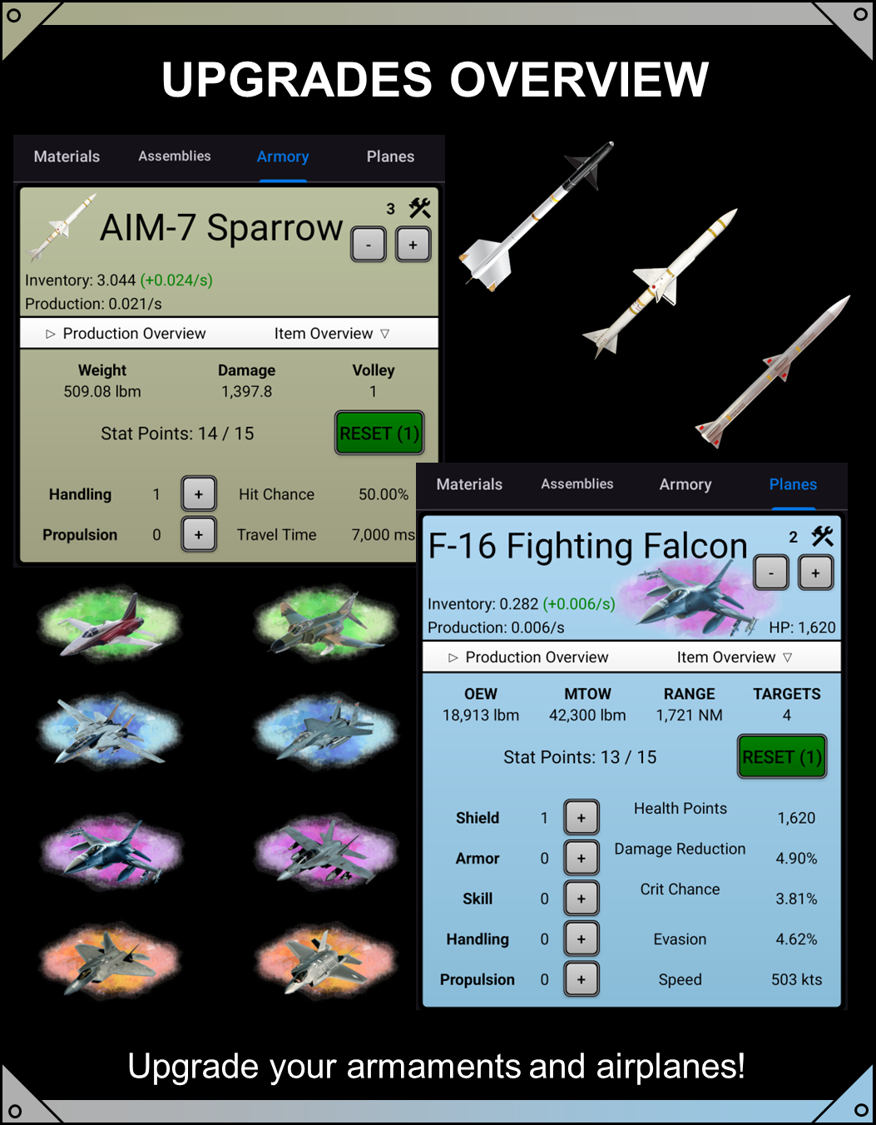
- Turn raw materials into assemblies, armaments, and planes
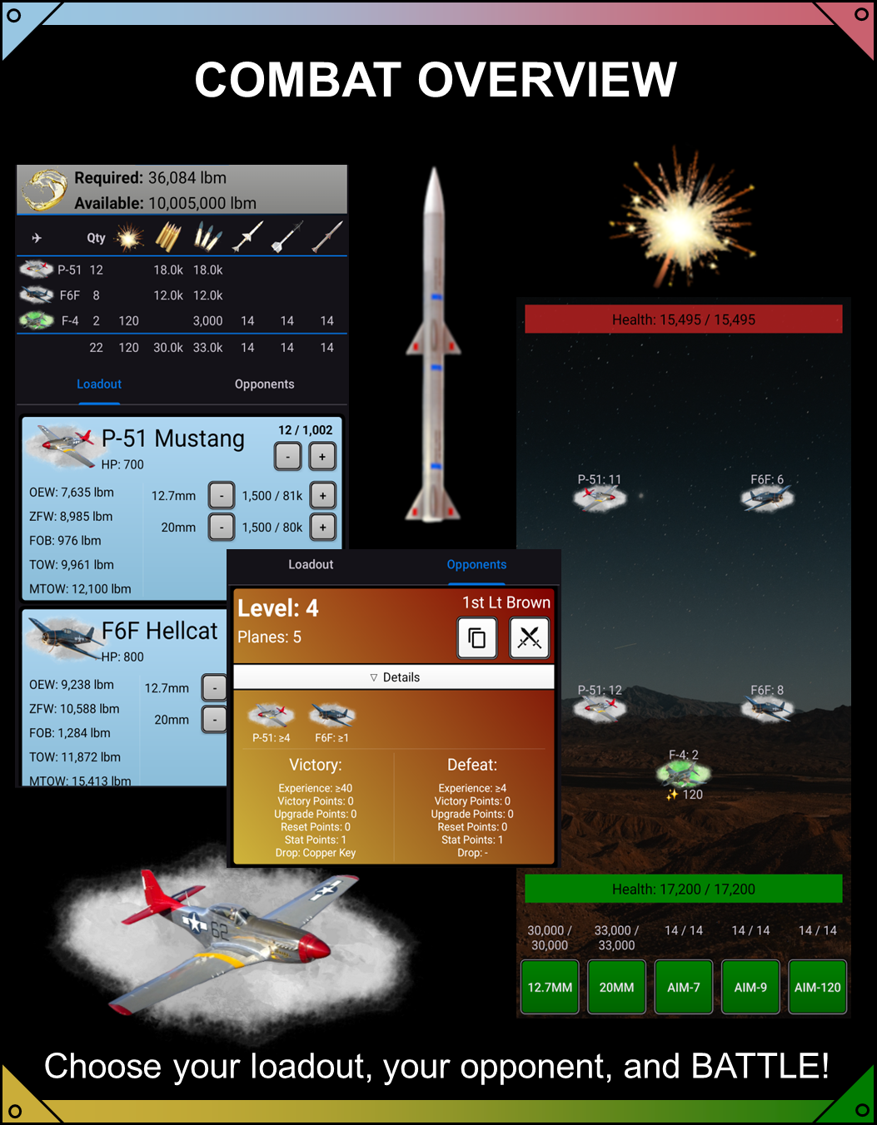
- Customize aircraft loadouts for combat
- Battle opponents to unlock new rewards
- Offline progress
- Relaxed gameplay with no constant tapping
Whether you want to optimize complex production lines or jump into a quick battle, Idle Planecraft is designed for short sessions and long-term progression.